




Plataforma de càrrega automàtica personalitzada per a bótes d'oli lubricant
Atributs del producte
| Forma del material d'embalatge: galleda quadrada de PE |
| Marca: Sunrise Intelligent Equipment |
| Personalitzat: Sí |
| Paquet de transport: estoig de fusta |
| Aplicació: barrils d'oli lubricant |
Etiqueta del producte
Sistema personalitzat, bótes d'oli lubricant, sistema de classificació i alimentació, plataforma automàtica, màquina d'ompliment, màquina d'embalatge, màquina d'embalatge, línia de producció d'oli lubricant, màquina personalitzada, màquina de desxifrar, oli lubricant.
Detalls del producte
Introducció de l'equip
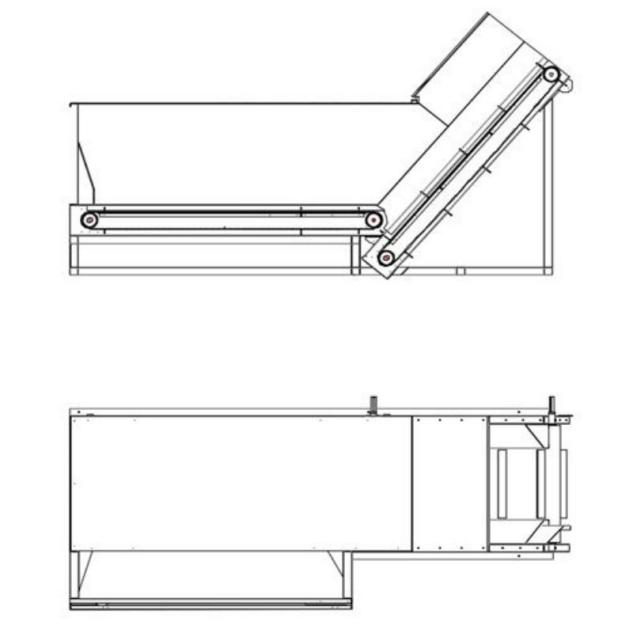
1. Dispositiu de cinturó elevador de galleda:
La cinta transportadora de dues etapes aixeca els barrils d'oli a una certa alçada i l'envia al transportador diferencial de manipulació d'ampolles.L'alçada del deflector del cinturó és inferior a la meitat del gruix dels barrils de petroli, cosa que afavoreix l'aixecament dels barrils de petroli d'una sola capa i el rodatge natural de la pila de barrils de petroli.

2. Manipulació diferencial d'ampolles:
La velocitat diferencial de transport multisecció s'adopta per realitzar l'acabat i el transport del barril d'oli lubricant.L'amplada de transport de l'entrada de la part de transport del barril permet que dos barrils passin al mateix temps, la qual cosa redueix el risc d'extrusió mútua del barril i millora l'estabilitat de funcionament de l'equip.Control de l'enllaç pas a pas del transportador multietapa per ajustar l'espaiat del barril.

3. Sistema de detecció de posicionament visual:
Instal·lat a la secció d'entrada de la cinta transportadora.El sistema de posicionament visual farà fotografies per localitzar i detectar l'estat de forma dels barrils de petroli lliurats, formar informació de dades i enviar-la al sistema robot després de l'anàlisi.El nombre, la posició i l'orientació dels barrils d'oli passats pel costat d'inspecció s'enviarà al controlador i el controlador enviarà les ordres de presa corresponents als dos robots de mà aranya segons els senyals rebuts.
4. Robot mà aranya manipulador d'ampolles:
Segons la informació dels barrils de petroli enviats pel sistema de detecció visual, la posició de presa s'ajustarà automàticament per agafar els barrils de petroli, i els barrils de petroli s'invertiran sota l'acció del cinquè eix i els barrils de petroli estaran en posició vertical. i la mà fixada cap a la cinta transportadora.Els dos robots aranya assignaran automàticament tasques de presa d'acord amb el nombre i la velocitat dels barrils de petroli lliurats.
5. Dispositiu de recuperació:
La seva funció principal és recollir barrils de petroli amb agafadors no vàlids i evitar l'acumulació i dany dels barrils de petroli amb agafadors no vàlids en circumstàncies especials.
6. El dispositiu de transport de barrils fa que la connexió i la transició entre la cinta transportadora de cada secció i la cinta transportadora de la màquina d'ompliment sigui bona, sense el fenomen de copejar el barril, estrènyer el barril i invertir el barril.

